Tasarımından Prototipe: Robotik Manipülatör ve Yapay Zeka Destekli Hassas Tarım
Geleneksel tarım yöntemlerinde ilaçlama tüm tarlaya boca edilerek yapılır; bu durum hem sağlıklı bitkilere zarar verir hem yeraltı sularını kirletir hem de maliyetleri artırır. Geliştirdiğimiz Otonom Tarım Robotu, taşıdığı yüksek çözünürlüklü kameralar ve yapay zeka destekli görüntü işleme algoritmaları sayesinde tarladaki bitkileri gerçek zamanlı olarak tarar. Sistem, sadece zararlı haşere barındıran veya hastalıklı olan bitkileri tespit eder. İnsansız Kara Aracımızın (İKA) üzerine entegre edilmiş çok eksenli robotik kol (manipülatör), tespit edilen bölgeye yönelerek yalnızca o alana ilaç püskürtür. Bu yenilikçi yaklaşım, kimyasal kullanımını %80'e varan oranlarda azaltarak sürdürülebilir tarıma büyük katkı sağlar.
Sistematik Atölye mühendislik ekibi olarak, Ar-Ge süreçlerimizde sıfır donanım hatası prensibiyle ilerliyoruz. Prototip imalatına geçmeden önce tüm sistemin detaylı 3 boyutlu mekanik tasarımı, ağırlık merkezi hesaplamaları ve yapısal analizleri lisanslı SOLIDWORKS yazılımı kullanılarak uluslararası mühendislik standartlarına uygun şekilde gerçekleştirilmiştir.
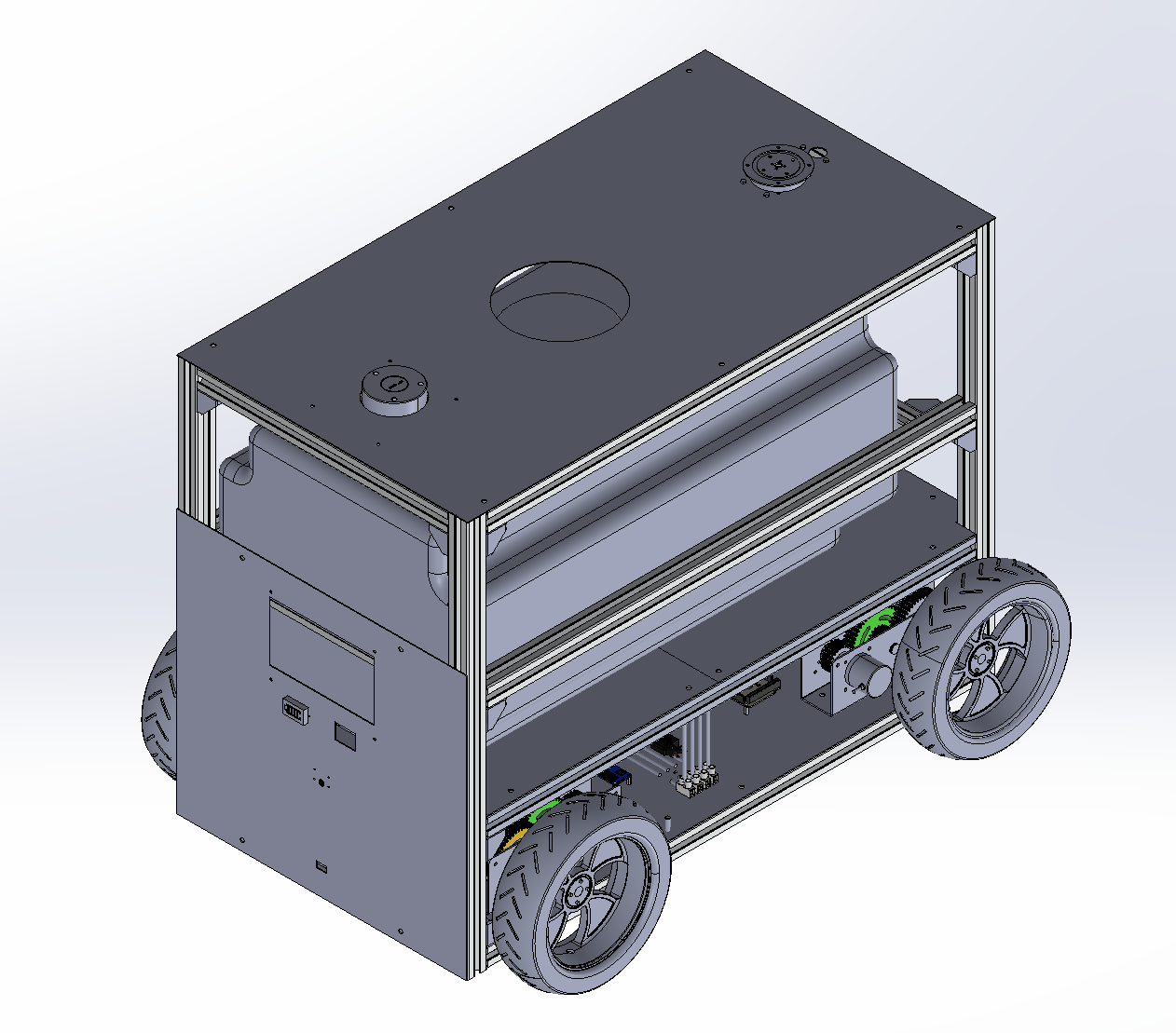 SOLIDWORKS ortamında gerçekleştirilen 3D mekanik tasarım ve şase modellemesi.
SOLIDWORKS ortamında gerçekleştirilen 3D mekanik tasarım ve şase modellemesi.
Modern robotik sistemlerin temelini oluşturan yazılım altyapısı firmamızın en güçlü yetkinliklerinden biridir. Endüstri standardı olan ROS 2 (Robot Operating System 2) altyapısını kullanarak geliştirdiğimiz otonom sürüş ve nesne tanıma algoritmalarımız, fiziksel testlerden önce Gazebo simülatöründe sanal arazilere yerleştirilir. Sistemin kinematik davranışları ve sensör verileri RViz (ROS Visualization) üzerinden gerçek zamanlı olarak incelenip optimize edilmektedir.
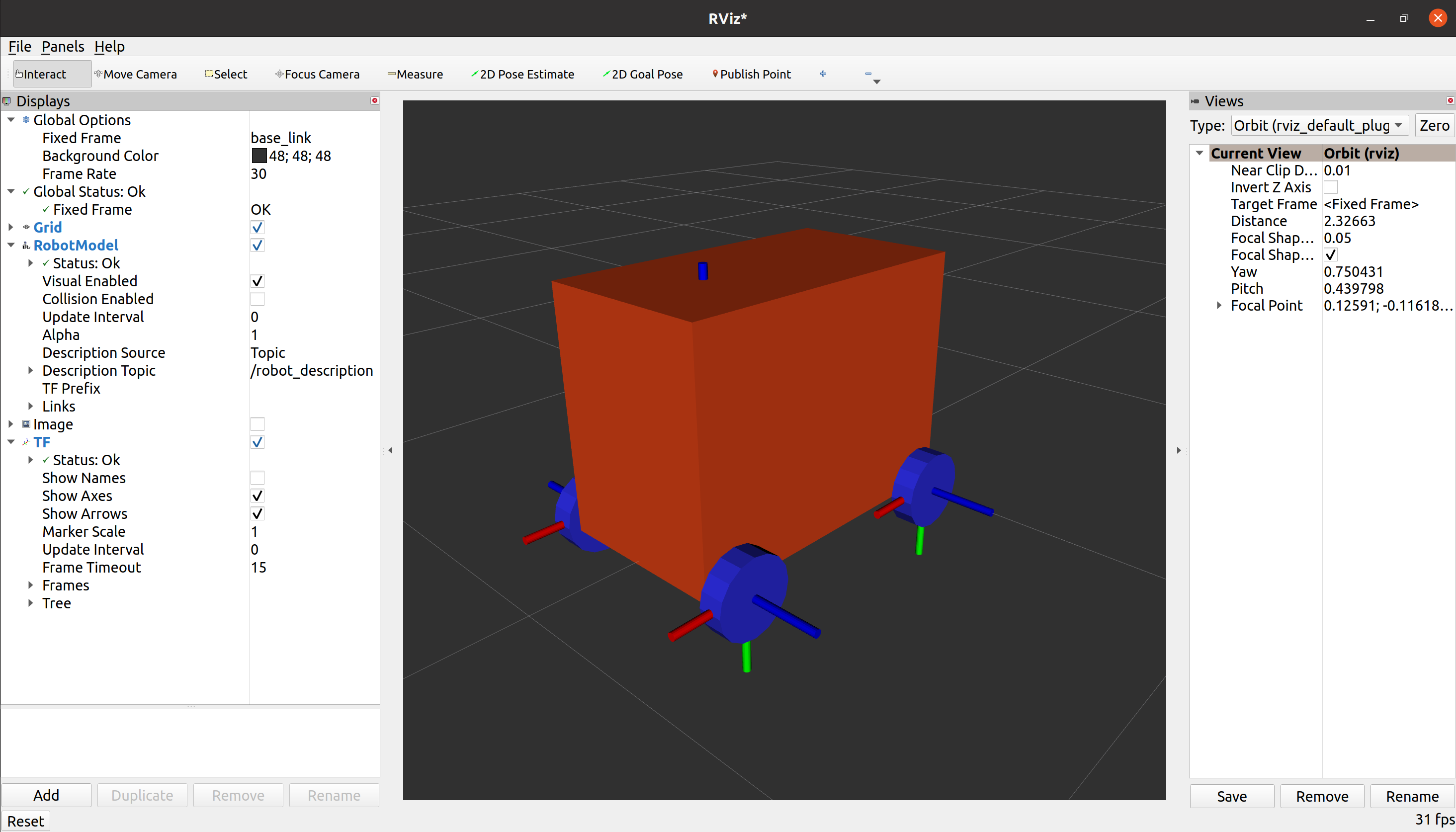 Robotun kinematik modelinin (URDF) ROS2 tabanlı RViz ortamında görselleştirilmesi.
Robotun kinematik modelinin (URDF) ROS2 tabanlı RViz ortamında görselleştirilmesi.
Sanal ortamda (CAD ve Simülasyon) tüm testleri başarıyla geçen Otonom Tarım Robotumuz, Bursa Uludağ Üniversitesi Teknoloji Geliştirme Bölgesi'ndeki ULUTEK PROMER prototip merkezinde fiziksel ürüne dönüştürülmüştür. Eklemeli imalat, lazer kesim ve CNC işleme teknikleriyle üretilen parçalar bir araya getirilerek gövde, güç aktarma grubu ve ilaçlama deposu entegrasyonu tamamlanmıştır.
 Mekanik montajı tamamlanan İKA prototipinin atölyedeki ilk fiziksel hali.
Mekanik montajı tamamlanan İKA prototipinin atölyedeki ilk fiziksel hali.
Sistemin beynini oluşturan mikrodenetleyiciler ve sensörlerin (Lidar, Kamera) mekanik gövde ile buluştuğu aşamadır. Mühendislik ekibimiz, ROS 2 üzerinde hazırlanan otonomi yazılımlarının gerçek dünya donanımlarıyla haberleşmesini (Hardware-in-the-Loop) sağlamak için laboratuvar ortamında hassas kalibrasyonlar gerçekleştirmektedir.
 Ekibimiz, donanım-yazılım haberleşme testleri ve sensör kalibrasyonlarını uygularken.
Ekibimiz, donanım-yazılım haberleşme testleri ve sensör kalibrasyonlarını uygularken.
Saha koşullarında kesintisiz çalışabilmek için enerji yönetimi kritik öneme sahiptir. İKA'nın 4x4 çekiş sistemi, motor sürücüleri ve güç dağıtım kartları, atölyemizde güç kaynaklarına bağlanarak farklı yük senaryolarında akım çekişi testlerine tabi tutulmaktadır.
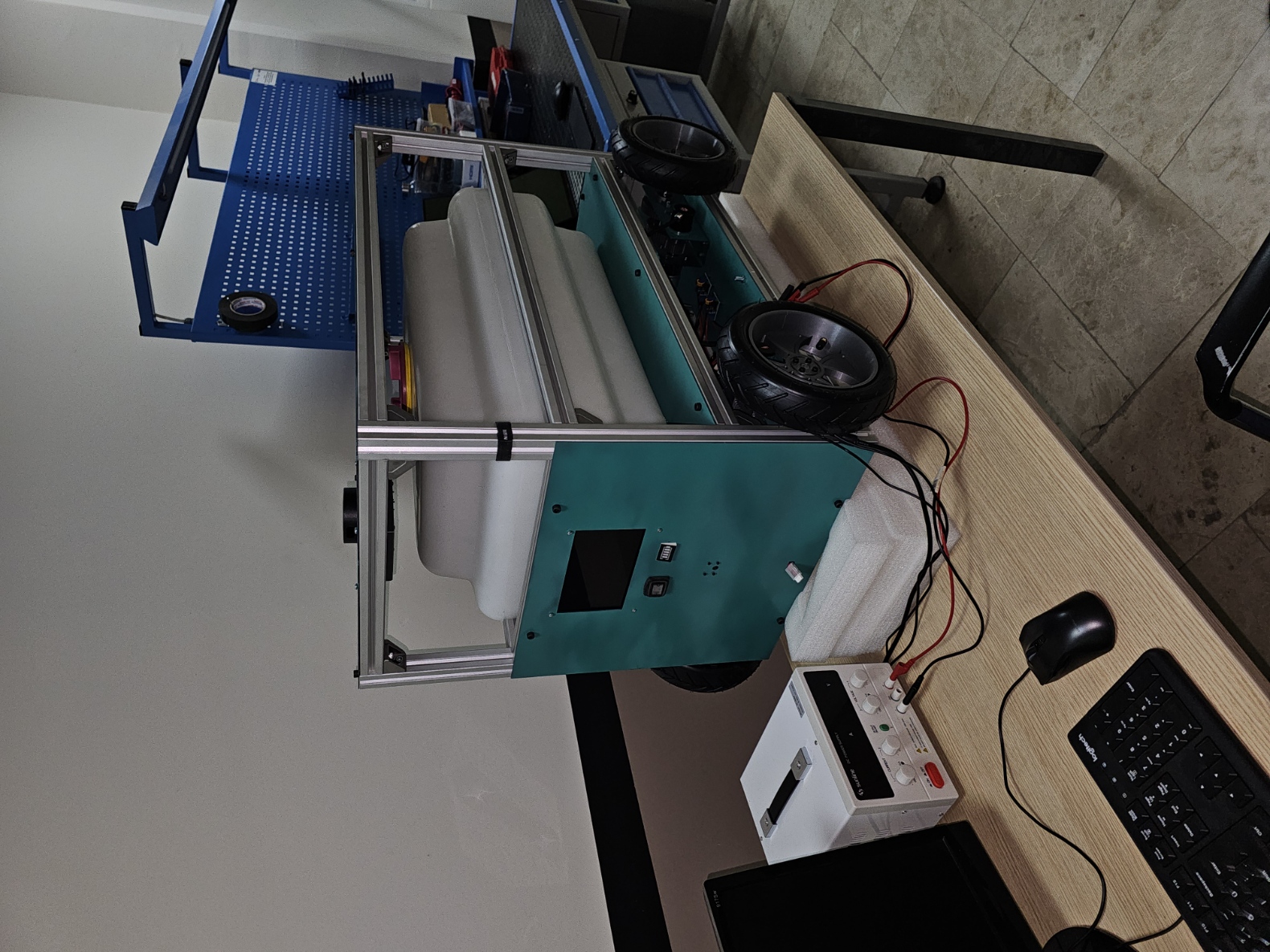 Motor sürücüleri ve bağımsız çekiş sisteminin laboratuvar ortamındaki güç testleri.
Motor sürücüleri ve bağımsız çekiş sisteminin laboratuvar ortamındaki güç testleri.
Atölye çalışmalarımız; tasarım istasyonlarından fiziksel test tezgahlarına kadar, bir Ar-Ge projesinin kağıt üzerindeki vizyonunu çalışan bir ileri teknoloji ürününe dönüştürürken gücünü modern mühendislik araçlarından almaktadır.
Mekanik süreçlerimizi lisanslı SOLIDWORKS ile tasarlıyor, otonomi sistemlerimizi ROS 2, RViz 2 ve Gazebo simülasyon ortamlarında geliştiriyoruz. Projenin yapay zeka ayağında ise tamamen kendi topladığımız tarımsal veri setini kullanarak Python ve Visual Studio Code ortamında özgün bir CNN (Evrişimli Sinir Ağı) modeli eğitiyoruz.